Camera Tracking là quá trình phân tích xử lý tín hiệu để giúp camera xác định được định hướng, di chuyển của một hoặc nhiều chủ thể trong không gian ảo 3D. Tối ưu hóa quá trình camera tracking là một những bước cơ bản không thể thiếu của vận hành trường quay ảo. ORAD, nhà cung cấp giải pháp trường quay ảo và công nghệ camera tracking hàng đầu thế giới cung cấp các giải pháp đa dạng cho camera tracking phù hợp với bất kỳ quy mô sản xuất và đầu tư. Một số giải pháp bao gồm: Xync - công nghệ tracking sử dụng hồng ngoại; Pattern Recognition (nhận dạng lưới) đi kèm với bộ xử lý tín hiệu HDVP (High Digital Video Processing); CamTrack công nghệ tracking lưới kèm hồng ngoại, tương thích cho cẩu; Opto Mechanical Sensor - công nghệ tracking sử dụng cảm biến… Xin giới thiệu các giải pháp tracking của ORAD và so sánh chung giữa các giải pháp này.
XYNC tracking sử dụng hệ thống hồng ngoại:
Dựa trên công nghệ tracking bằng hồng ngoại, Xync cho phép tự do di chuyển trong khoảng không gian trường quay, tương thích cho các thiết bị dolly, cẩu hoặc camera vác vai. Xync là giải pháp tracking mạnh mẽ và hoàn thiện nhất đem lại tính linh động và chân thật đến bất ngờ.
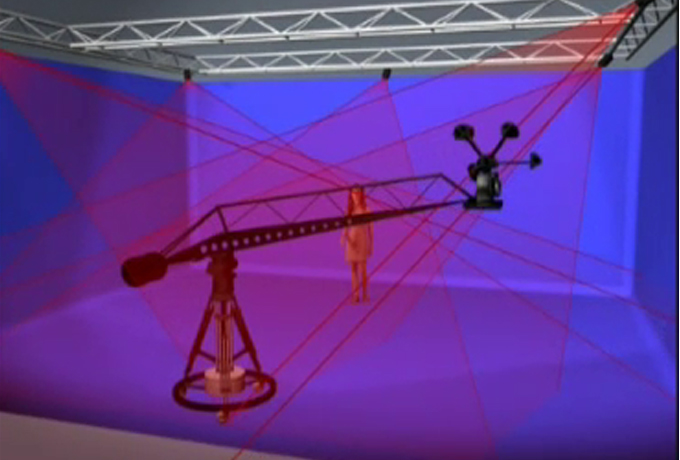
Hệ thống Xync có cơ chế hoạt động như sau: Một bộ phận cảm ứng hồng ngoại (target tracking infrared) được gắn cố định trên camera, bộ phận này giao tiếp với các camera quan sát được gắn cố định trên tường, trần hoặc giàn đèn của trường quay, các camera này tiếp thu các tia hồng ngoại từ đó tính toán được vị trí X,Y,Z , cũng như các định hướng xoay, zoom, pan … của camera (hình tham khảo)
Đối với các camera sử dụng chân đế di chuyển, bộ target thường sử dụng loại ring shape target, một bộ phận có dạng hình đa giác tròn, gắn đầu cảm biến ở các mặt, trong trường hợp dùng camera vác vai, hoặc cẩu thường sử dụng bộ Xync star shape target, hình dạng giống ngôi sao, có năm cạnh mỗi đầu cạnh gắn cảm biến hồng ngoại, và 2 cạnh ở ngay trung tâm phía trên. Xem hình tham khảo.

Xync Ring Shape Target
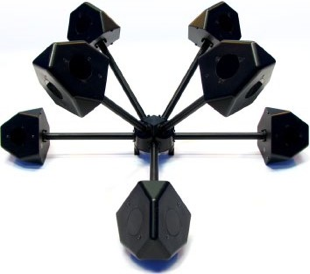
Xync Star Shape Targett
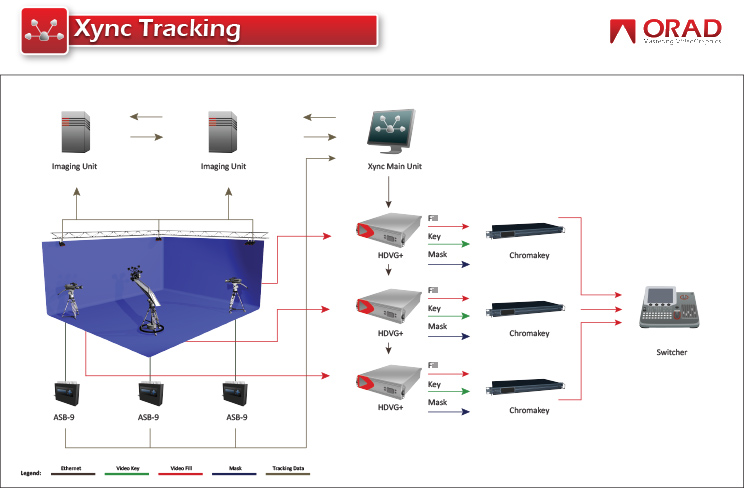
Ngoài ra, một bộ cảm biến đặc biệt được gắn trên lens của camera để thu thập thông tin về zoom và focus. Xync cho phép hỗ trợ không giới hạn số lượng camera trong studio. Sau khi thu thập các data tracking được chuyển về XYNC Main Unit xử lý và render ra đồ họa real time bằng các engine Realset hoặc Proset.
Pattern Recognition - sử dụng lưới:
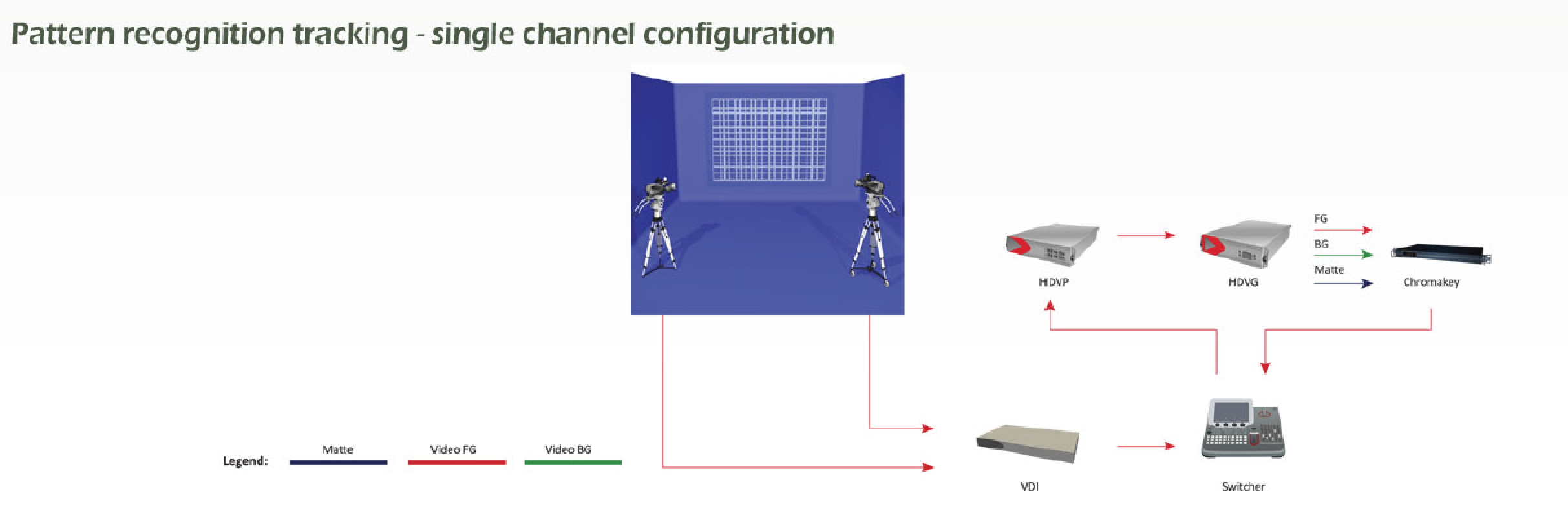
Hệ thống tracking sử dụng lưới đem lại hiệu quả cao với giá thành phù hợp là lựa chọn lí tưởng cho các hệ thống trường quay đơn giản, tương thích với đa số các camera hiện nay. Với setup đơn giản, dễ dàng không yêu cầu bất kì thiết bị hỗ trợ thêm nào gắn trên camera. Pattern Recognition hoạt động trên nền phông chromakey green hoặc blue. Trên các nền phông này có một lớp lưới. Khi tấm lưới được gắn lên phông xanh, tín hiệu video từ camera tường quay được gửi đến engine HDVP (High Digital Video Processor) engine này sử dụng các thuật toán nhận dạng lưới sẽ tự tính toán sẽ được tính toán vị trí, hướng của camera. Các data tracking sau đó sẽ stream qua mạng kết nối chuyển tới render engine HDVG, dựa trên các số liệu tracking thu thập được. HDVG sẽ render ra background đồ họa trường quay. Các đường lưới sẽ được key qua quá trình xử lý chromakey. Trong quá trình hoạt động, các camera phải nhận dạng được 15% lưới thì có thể xử lý được. Nếu camera không nhìn thấy hoàn toàn lưới, tín hiệu đò họa sẽ không ổn định.
Hệ thống Pattern Recognition có thể hoạt động trong bất kì môi trường video nào, hỗ trợ các định dạng và chuẩn PAL,NTSC, SD hoặc HD. Các kích thước tấm lưới có 3 kích cỡ : 2x1m ; 4x2.5m ; 5x3m. Các kích cỡ khác có thể đặt hàng theo yêu cầu.

Sơ đồ quy trình hoạt động của Pattern Recognition:
CamTrack Infrared:
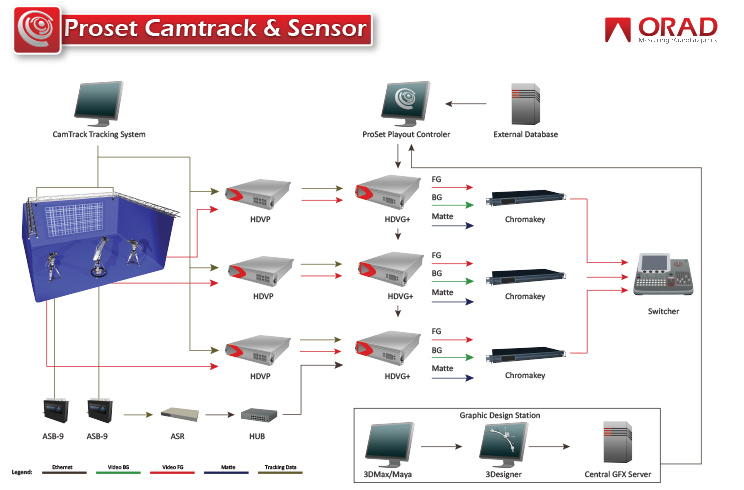
Hệ thống CamTrack là một hệ thống sử dụng hồng ngoại kết hợp với hệ thống lưới của Pattern Recognition, bao gồm 2 camera quan sát được gắn cố định ở hai đầu phía trên phông xanh, đồng thời có một đèn LED nhỏ được gắn trên các camera trường quay. Mỗi đèn LED hồng ngoại này được gắn một ID nhất định tương đương với ID của từng camera. Khi hệ thống được căn chỉnh, vị trí của 2 camera quan sát cố định. Các vị trí ( X,Y,Z) của camera được tính toán bằng cách sử dụng hồng ngoại từ đèn LED trên camera tới các camera quan sát, hướng của camera (pan, tilt, roll) được xác định bằng lưới, sử dụng thuật toán nhận dạng lưới. Các thông số tracking được tính toán bằng một PC điều khiển dành cho CamTrack.
Hệ thống CamTrack có thể sử dụng độc lập, cũng như có thể kết hợp với các loại tracking khác như Opto Mechanical , Sensor để tăng tính linh hoạt và hiệu quả trong quá trình sản xuất.
Sơ đồ quy trình hoạt động của CamTrack:
Opto-Mechanical Sensors:
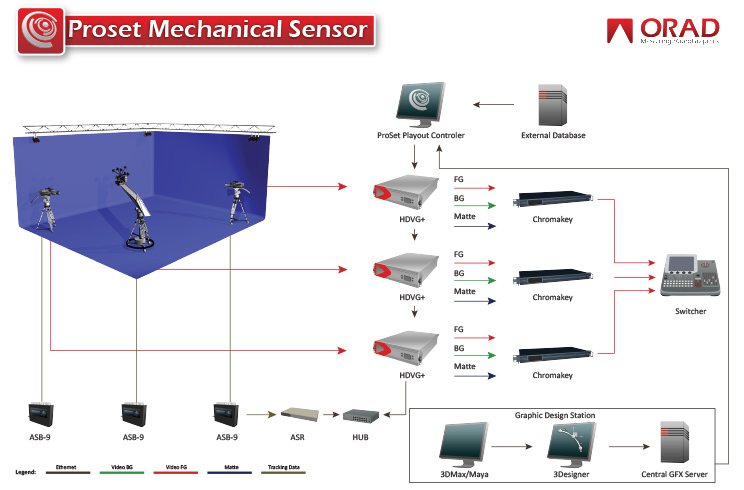
Được gắn lên chân đế di chuyện hoặc tripod, phương pháp tracking Opto - Mechanical (quang - cơ học) có độ nét chính xác và độ phân giải rất cao. Sensor head thu nhận tín hiệu pan, tilt của các chuyển động của camera, cho phép quay vòng 360 độ. Ngoài ra, các thông số zoom, focus được thu nhận trực tiếp từ lens của camera. Công nghệ này tương thích với đa số các loại lens analog hay digital.

Sensor head
Công nghệ cảm biến của Orad còn cho phép truyền tín hiệu tracking qua đường audio của camera hoặc qua bộ RS-232 để display trên hệ thống trường quay ảo. Hoặc có thể truyền tín hiệu tracking qua Ethernet trong cùng một hệ thống qua thiết bị ABS-9 gắn trên camera:

Sơ đồ tham khảo:
ORAD’s VR One tracking:
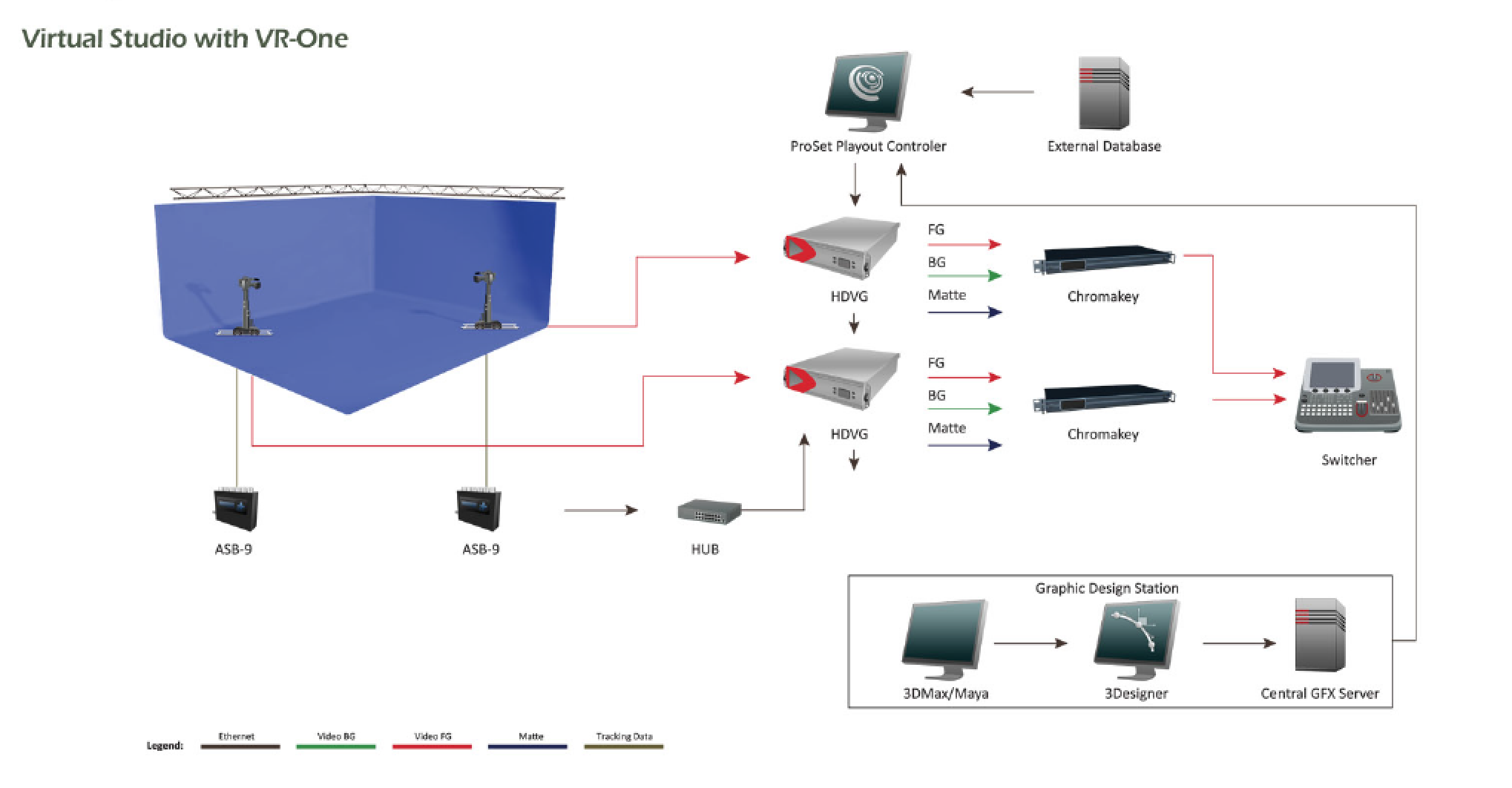
Orad VR One là một robotic camera head tích hợp với bộ encoder độ phân giải cực cao cho phép tham chiếu chính xác vị trí của đồ họa trong chiều không gian ảo (vị trí x, y, z)
VR-One hỗ trợ tải trọng 19kg phù hợp với camera chuẩn SD hoặc HD ENG. Đầu camera cho phép 3 mức chuyển động như pan, tilt v.v... Sử dụng VR-One, vị trí tọa độ camera được tính toán hoàn toàn real time, bắt tracking liên tục với độ chính xác cao, hoàn toàn phù hợp với bất kỳ loại hình sản xuất nào mà không cần đến người quay phim.
Trong quá trình sản xuất, các cú cam được thực hiện bằng cách sử dụng cần điều khiển (joystick). Các data tracking được chuyển qua giao thức IP (UDP) hoặc nối tiếp trở lại hệ thống để xác định chính xác đồ họa trên không gian ảo.

Robotic head VR-One

Bàn điều khiển VR-One với Joystick
Sơ đồ hệ thống hoạt động của VR-One:
Pattern recognition với Sensor Head và CamTrack:
Về cơ bản là việc kết hợp 2 hoặc nhiều hơn các phương pháp tracking để đạt hiệu quả cao hơn, phù hợp theo nhu cầu sản xuất.
Việc sử dụng thêm Opto-Mechanical sensor head với hệ thống nhận diện lưới sẽ cho phép tăng độ bao phủ khi tracking, bù trừ cho một số khuyết điểm khi sử dụng tracking với lưới (vốn phải hiện được ít nhất 15% lưới).
Lợi thế lớn nhất khi kết hợp các giải pháp tracking là nhằm giảm thời gian của quá trình căn chỉnh. Ví dụ khi kết hợp Pattern Recognition với sensor head, quá trình căn chỉnh (calibration process) sẽ trở nên nhanh hơn nhiều khi vị trí của các camera được xác định qua hệ thống lưới, và khi kết hợp với sensor head sẽ cho phép có các cú zoom cận với độ chính xác cao mà không bị hạn chế bới 15% lưới khi sử dụng đơn thuần Pattern Recognition.
Khi kết hợp Opto-Mechanical với hệ thống Camtrack hồng ngoại làm tăng thêm độ bao phủ của tracking khi có thể sử dụng kèm với cẩu (crane) cho phép thực hiện những cú lia cam nhằm tăng thêm hiệu quả thị giác.
Sơ đồ mix hệ thống Camtrack và Sensor:
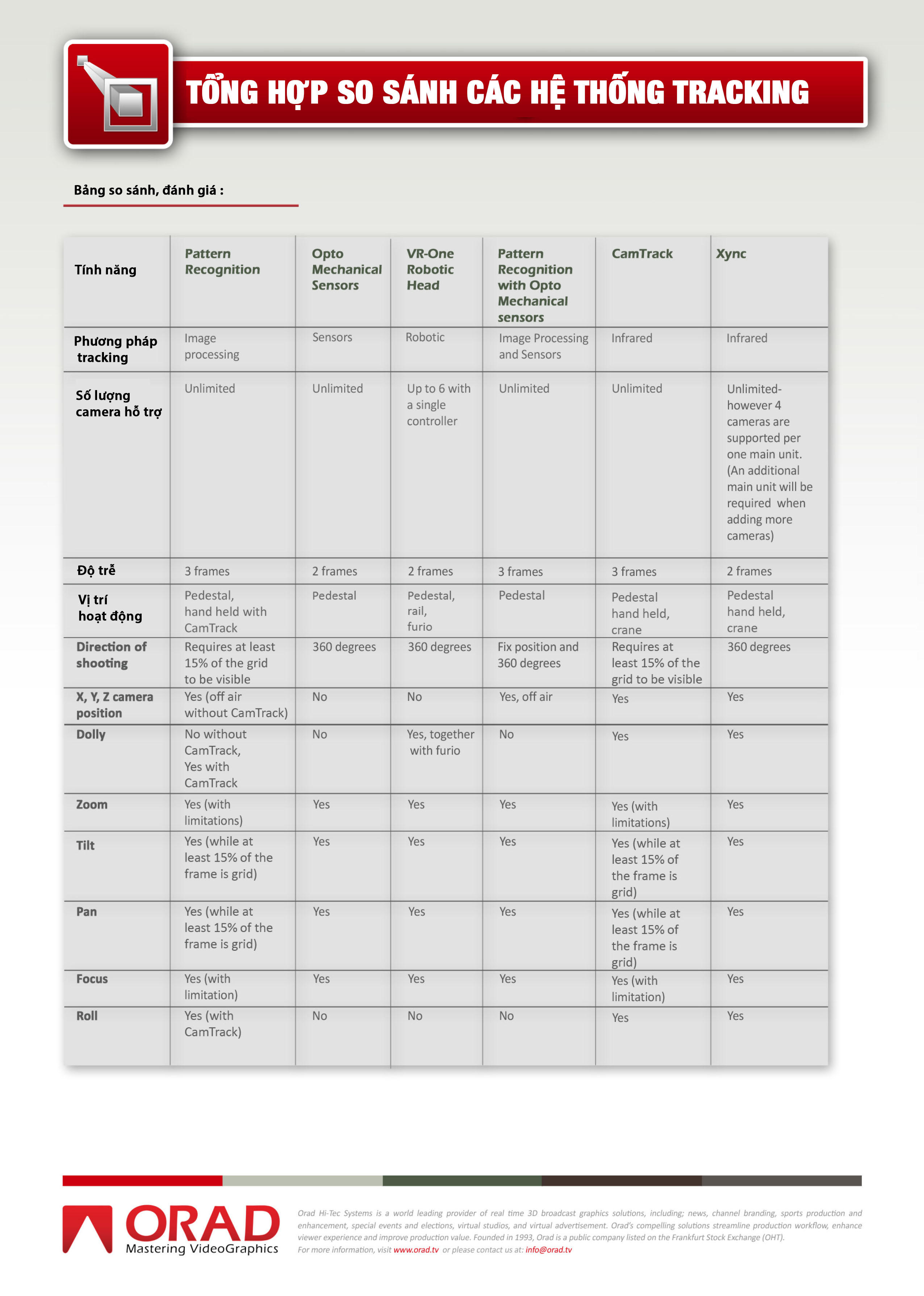
Bảng so sánh giữa các hệ thống tracking của ORAD: